Automation & Mobility design by Rob Bodnar

Why autonomous vehicles (AV’s) are not safe today and how to fix it:
The death toll on US roadways in 2018 was 36,560. That is 11 dead people per 100,000. Will autonomous vehicles reduce this number or increase it?
There is a whole lot of work going into making autonomous vehicles safe for operation on public roads… however, there is a whole lot of hurdles and not enough data to support AV’s to be safe. Without any type of infrastructure in place, now is not the time to deploy AV’s. Disengagements of the AV system happen all the time and the numbers we see are not very encouraging. While we are all trying to understand and fix the problems with AV’s, it is not the programmers that need to step things up, it is all of us. We as humans learn how to drive and get better at driving as time goes by, where teaching a computer to drive is extremely difficult.
The technology is not ready and it will not be 100% safe until we change a few things as a society. First, we need to understand what is wrong, then we can proceed on how to fix it. There is no point in considering which company is doing what to improve this technology which there is no answer, the only correct answer is total verifiable infrastructure support.
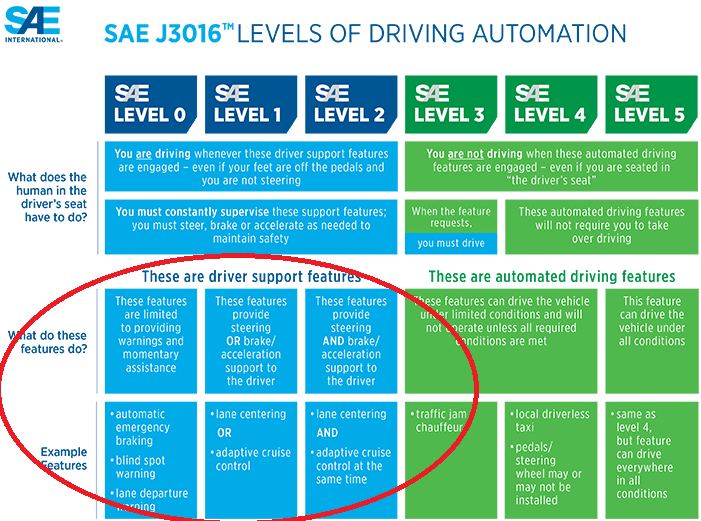
Society of Automotive Engineers (SAE) chart on the levels of autonomy.
I really do not like this chart, as it misses several topics between level 0-2. There should be more information to support semi-autonomous driving and technological features to prevent crashes. Driver supported features will ensure AV trust. Crash avoidance being the most significant. Rob, how dare you question the SAE’s AV chart!
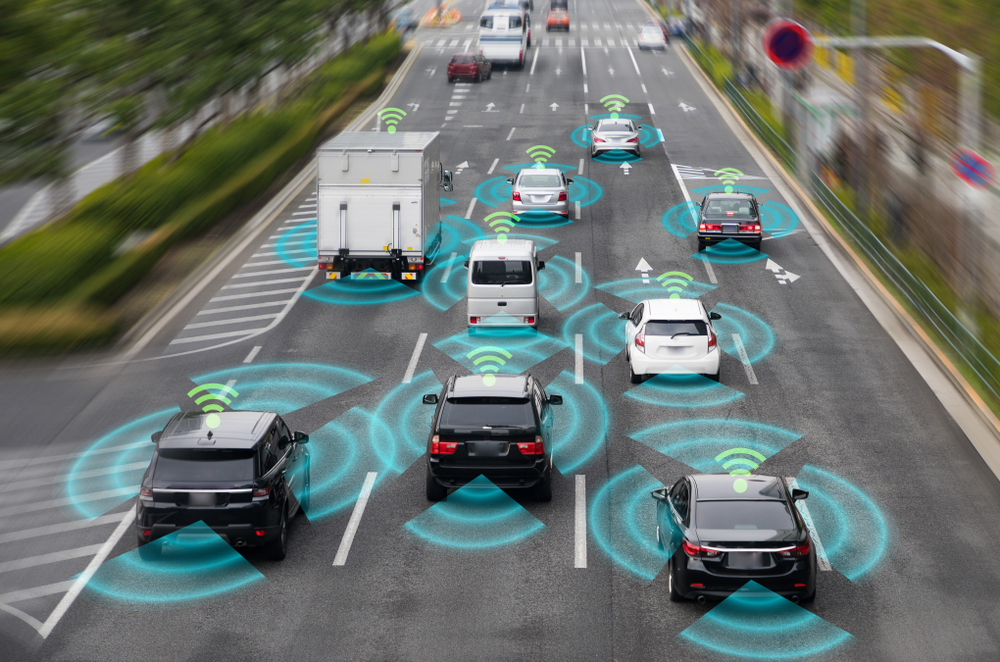
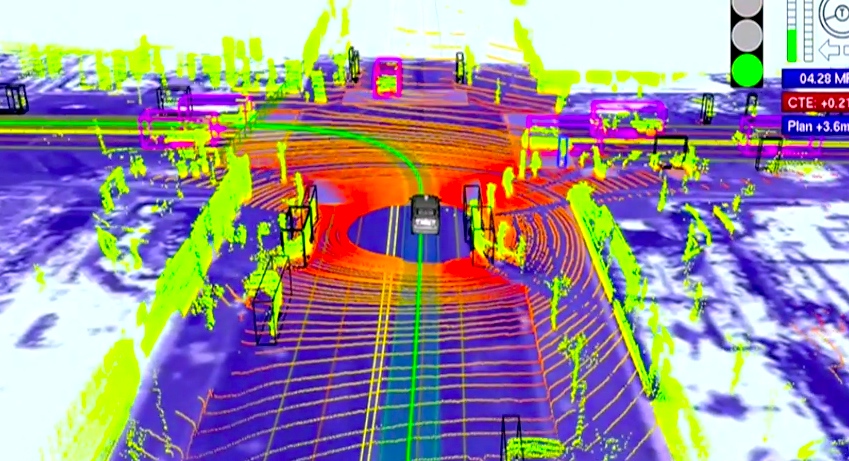
How autonomous vehicles “see” our world:

What is wrong with AV Technology:
- Lack of standards for AV’s.
- People are getting killed or injured trusting AV technology.
- Why do we need driver-less vehicles in the first place?
- What are the use cases for AV’s?
- No supported infrastructure.
- AV disengagement happens.
- Vehicles are “solo” and do not share road perception data.
- No common programming or shared interlocks.
- Limited AI and perception.
- Lack of reasoning skills.
- Lack of empathy.
- Dependent on 3rd party GPS.
- Dependent on vision systems.
- Single points of failure.
- Technology not proven. Data is not provided.
- Weather can affect perception and performance.
- Anomalies, construction area’s, wildlife, and zones are not recognized by the AI.
- No option for a virtual driver.
Simple block diagram on how an AV programming works:
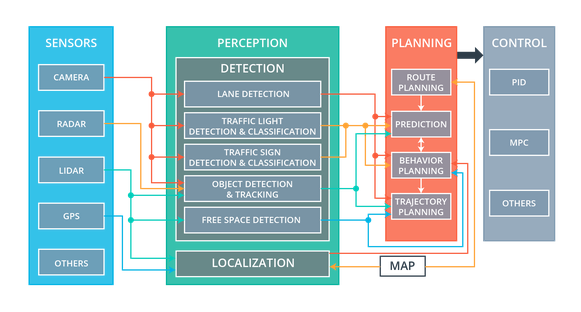
The AI is not human, therefore it cannot perceive, react and empathize like a human, we need to teach them.

How to design safer autonomous vehicles for tomorrow:
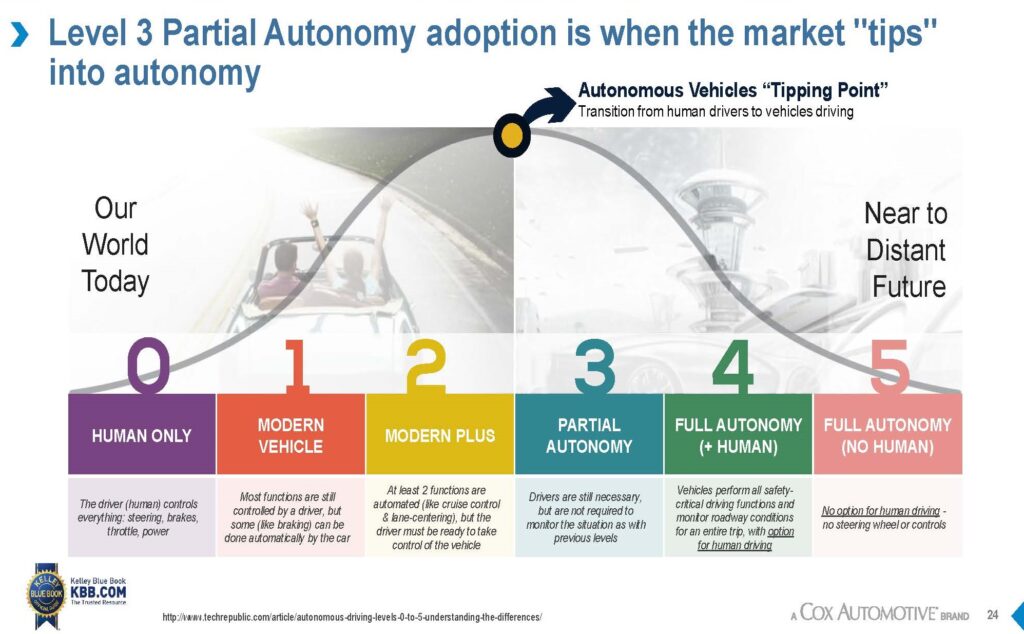
The area of the “tipping point” needs to be expanded in the chart.. there should be about 10 levels of AV not 5.
LEVEL 2A should be: a “crash proof” semi-autonomous vehicle. The system will avoid a crash into a stationary object, even if the driver purposely attempted to crash. The AV would take over the vehicles’ controls, avoid the object and stop safely out of the way of other traffic.
LEVEL 2B should be: avoid crashing into another moving object with AV taking over the controls. I would like to see the day where 3 semi-autonomous vehicles with drivers attempting to crash into each other on purpose and the AV system will avoid all collisions as if they were opposing magnets. Then I think the AV human trust will begin, until this happens the trust may not occur.
- Additional semi-autonomous safety & new Semi-autonomous (SAV) driving features like super cruise, auto lane changing, self-parallel parking, emergency crash avoidance, roadway debris, weather avoidance, situation avoidance, trajectory forecasting.
- Go to step #1 a few more times.
- Operational districts and roadways that are deemed “safe” for AV vehicles that include local infrastructure support.
- Vehicle detection network for emergency, police, fire and military vehicles.
- Option to Opt-out for safety utilizing a device or app. Bicycle rider broadcasting position and telemetry to be safe.
- Common V2N code to share holoportation perception data with other vehicles. Non-AV’s can be retro-fitted with a device to keep the roads safe by uploading data.
- Crash-proof AV’s.
- Position and telemetry data broadcast in real time to a common open-shared network (V2N) and stored for retrieval and playback.
- Secure data utilizing blockchain technology for verification.
- HOV Lane Markers, suspension bridge markers, with Smart ID Badges.
- High risk area’s clearly marked for AV’s and deploy sentinel vehicles to monitor and collect data.
- Smart Road Signs, Highway Markers and addresses clearly marked with barcodes.
- Sentinel Traffic Signals.
- Sentinel Patrol Vehicles for mapping, tracking and problem areas.
- Historical data accumulated through the smart traffic signals, sentinel vehicles, emergency vehicles, and maps.
- Vehicle to Vehicle (V2V) communications.
- 4D imaging of areas utilizing V2V vision and perception.
- Ability to re-route based on traffic patterns and historical data to keep traffic moving efficiently.
Rule #1: AV shall not collide with a stationary object.

Rule #2: AV shall not collide with another moving object.
Rule #3: AV shall be hard-wired and hard-coded to avoid a collision with any living being.
Rule #4: AV shall not collide with any other AV.
Rule #5: AV shall protect it’s passengers and cargo.
